In the last few posts we introduced the concept of local image descriptors and specifically binary image descriptors. We surveyed notable example of binary descriptors, namely BRIEF[1], ORB[2], BRISK [3] and FREAK[4]. Here, we will both introduce a novel binary descriptor that we have developed and give a full evaluation of several binary and floating point descriptors. We will show that our proposed descriptor – the LATCH descriptor[5] – outperforms the alternatives with similar running times. We will also demonstrate its performance in the real world application of 3D reconstruction from multiple images.
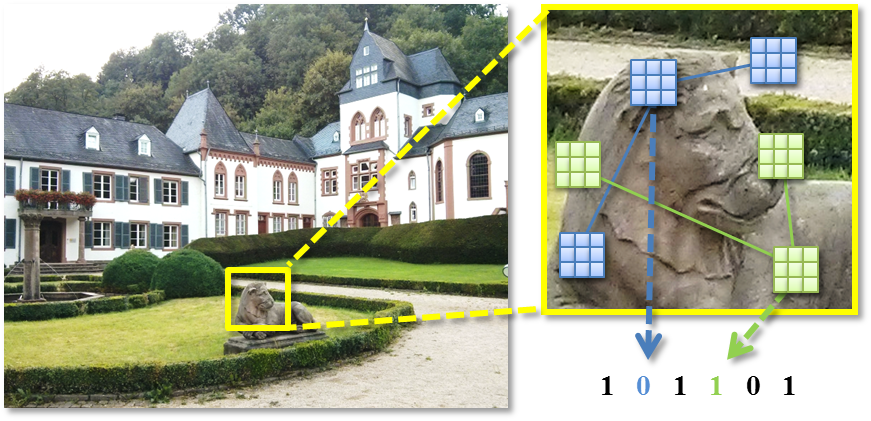
Given an image patch centered around a keypoint, LATCH compares the intensity of three pixel patches in order to produce a single bit in the final binary string representing the patch. Example triplets are drawn over the patch in green and blue
Our proposed LATCH descriptor was presented in the following paper:
Gil Levi and Tal Hassner, LATCH: Learned Arrangements of Three Patch Codes, IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, March, 2016
Here is a short video of me presenting LATCH at the WACV 16 conference (I apologize for the technical problems in the video).
Our LATCH descriptor has already been officially integrated into OpenCV3.0 and has even won the CVPR 2015, OpenCV State of the Art Vision Challenge, in the Image Registration category !
Also, see CUDA (GPU) implementation of the LATCH descriptor and a cool visual odometry demo, both by Christopher Parker.
For more information, please see LATCH project page.






